|
第二届上海大学十大学术进展候选项目简介 (申报编号:XSJZ-202224) 
一、学术进展名称及负责人: 柔性机器人与微纳操作 田应仲(上海大学机电工程与自动化学院教授 二、项目背景: 《国家中长期科学和技术发展规划纲要》提出,以科技发展的局部跃升带动生产力的跨越发展,重点发展军民融合、保障国家安全和增强综合国力的重大战略。柔性机器人与高精度微纳操作是航空航天、通信设备等国家重大需求领域的核心技术,是制约尖端装备检修及先进制造的卡脖子问题,具有极为重要的经济与社会意义。强动态干扰下,柔性机器人对多样化目标的精密作业面临“运动模式单一”、“负载能力有限”、“感知精度不足”的难题。对于微纳操作而言,目前主要存在 “纳米精度难实现”、“传动行程难保证”、“操控器件难构建”的挑战。综上,需突破柔性机器人智能感知与精密作业、高精度多维微纳操作关键技术,支撑在尖端装备检修及先进制造等领域实现多尺度“驱动精”、“传动准”和“操控顺”。 三、学术进展及创新点: 经多年技术攻关,研究团队在柔性机器人与微纳操作上取得国际先进的科研成果,主要创新点如下: 1.发明了柔性机器人变胞设计与多功能重构方法。提出基于折纸结构三维映射的形变调控机理,实现几何一致执行器多样化运动,结合榫卯结构和磁吸式原理,实现面向不同操作场景的多功能重构,极大提升操作灵活度;发明了多驱动协同刚度高效调节与适应性形变控制。提出基于聚乳酸热相变的刚度调整策略,基于气液混合热交互框架,变刚度效率提升90%,采用差异化目标随形操作机制,非敏感目标操作时间降低90%,有效解决机器人末端刚度不足的问题;发明了多模态信息融合自驱动感知方法。提出基于摩擦电原理的柔性滑/触觉和形态传感器,突破基于机器学习的多模态信息融合感知方法,有效避免传感器形-触耦合效应导致的感知偏差,操作目标预测准确率达98.1% 2.发明了多维精密平台动态迟滞补偿与协同控制技术。基于唯象模型的非对称迟滞表征与补偿方法,实现多维精密平台的迟滞交叉解耦,使动态迟滞的辨识误差均方根值降低11.28%,耦合位移误差减小4倍以上;发明了多维大行程柔顺传动机构创成设计方法。提出拓扑优化法与伪刚体法结合的多自由度柔顺机构设计理论,建立基于卡氏第二定理与弹性梁理论的柔顺机构运动模型,实现0.19um和0.37urad直线/转角定位精度;发明了原位非接触微纳器件快速构建技术。提出了基于光镊和光成形的原位微成形技术,建立基于不同表面特性的微纳操作器非接触组装操控方法,实现末端操作器件5um/1um的特征尺寸和成形误差,操控和成形时间均小于0.2s。 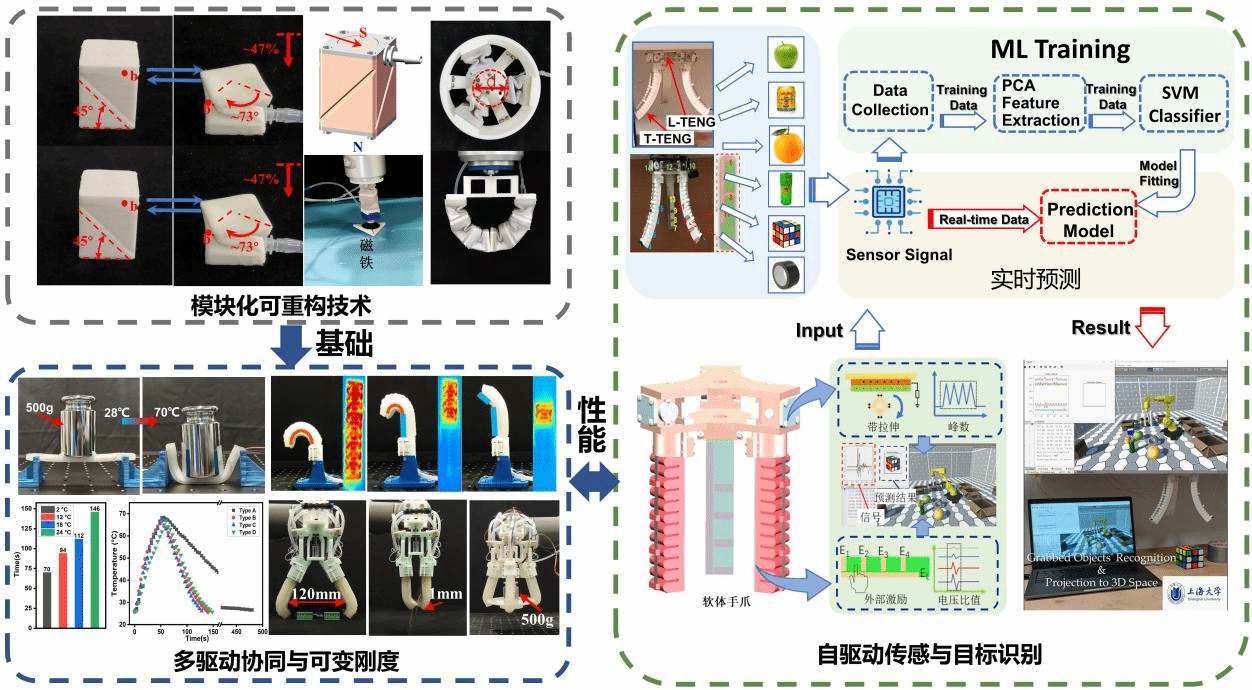
图1 强动态干扰下智能感知与精密作业技术 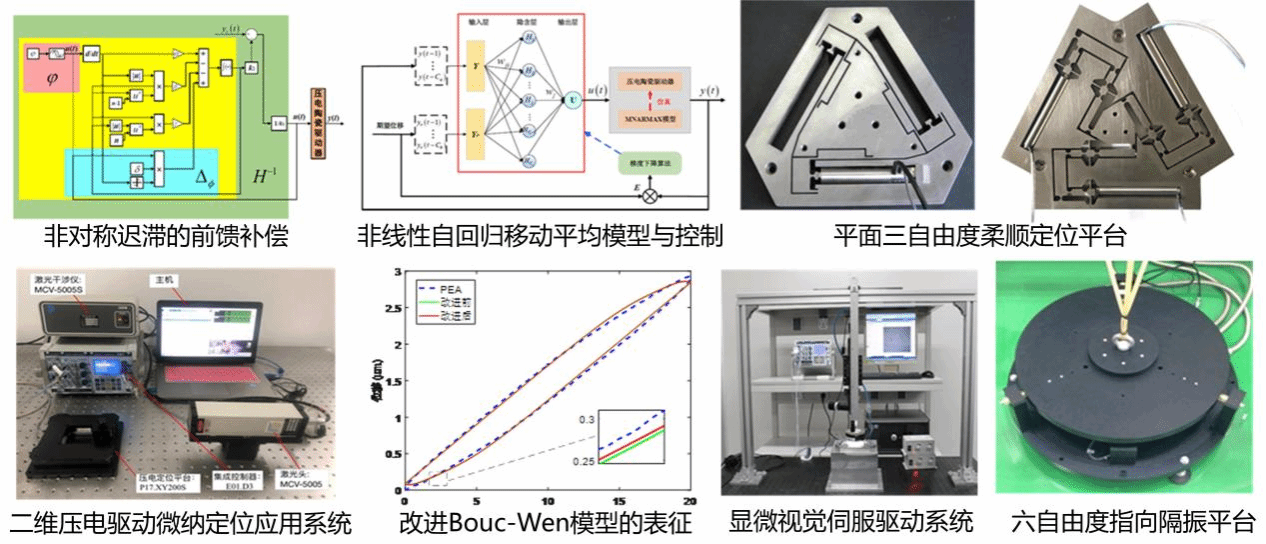
图2 高精度多维微纳定位及操控技术 四、研究成果及应用情况、学术及社会影响: 相关研究取得大量前沿原创性成果并打破国外技术垄断,发表包含Nature子刊高水平论文36篇,授权发明专利32项,参与制订国家标准4项。 1. 代表性成果(论著、专利及获奖) (1)中科院一区TOP论文:Nature Communications(2020年10月、2022年2月)、Nano Energy(2021年9月)、IEEE Transactions on Robotics(2021年8月)、Advanced Science(2021年11月)、Soft Robotics(2021年12月)、Mechanism and Machine Theory(2022年7月)等。 (2)中国国家发明专利5项:ZL202110632036.1、ZL202010710239.3、ZL201810527252.8、ZL201810527230.1、ZL202011567593.1等。 2. 学术及社会影响 光耦合自动化组装设备核心指标达国际同等水平,光通信产品获得思科wiggle 认证,北美GR326 认证,产品供应 Broadcom、Intel、Molex、波若威等全球TOP 10光模块厂家;产品和技术成功应用于嫦娥系列月球车光谱仪定标板的控制、高精度对地遥感卫星指向平台、中国商发CJ1000A 大飞机发动机叶片精密铸造模具、芯片射频倒封装工艺 CP 测试等,有力支撑了通信设备、航空航天等国家重大需求,近三年新增经济效益3.05亿元。
|